A.M.I.R.
Descrizione del robot A.M.I.R.
A.M.I.R. è il nome che ho dato al primo robot che ho costruito, il suo nome è l'acronimo
di Automaton Micro Intelligent Robot (Micro Robot Automa Intelligente), un piccolo
robot "intelligente" in grado di muoversi in totale autonomia.
Il robot è stato costruito quasi interamente con pezzi di ricambio recuperati da apparecchiature elettroniche guaste, fatta eccezione per il NUTCHIP utilizzato per la scheda di controllo. Ho preferito costruire un robot con materiali recuperati, sperimentando la realizzazione della meccanica e della parte elettronica per il piacere di "crearlo" con le mie mani. Infatti il fine non era quello di giocare con un robot commerciale "preconfezionato", ma divertirmi a realizzarlo partendo da semplici e comuni materiali che ogni appassionato di elettronica e/o robotica ha nel proprio "laboratorio".
La struttura del robot A.M.I.R. è formata da due piastre di alluminio, separate da quattro distanziatori esagonali da 4 cm. Nella piastra inferiore trovano posto le due ruote motrici, i due motorini, la pallina che funge da terza ruota, il contenitore per le pile ricaricabili e la logica di controllo dei motori. Nella piastra superiore sono stati collocati i due sensori di contatto e la scheda logica centrale.
Come si può notare dalle foto seguenti, il robot A.M.I.R. ha una struttura "simile" al famoso e conosciutissimo Boe-Bot® robot prodotto e distribuito dalla Parallax Inc.
Nella piastra inferiore sono stati montati, in posizione perpendicolare, i due motorini da 6VDC con vite senza fine (recuperati da un vecchio fax). Le ruote motrici (recuperate da una vecchia stampante) sono state fissate alla piastra inferiore con due squadrette di alluminio e "accoppiate" ai motori tramite ingranaggi in plastica (recuperati da una vecchia stampante). La pallina da ping pong è stata forata diametralmente e fissata alla piastra con due squadrette in alluminio
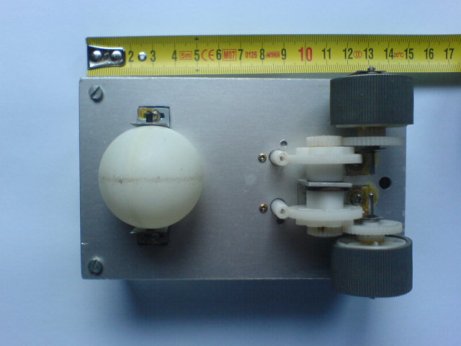
Foto della piastra inferiore del robot AMIR
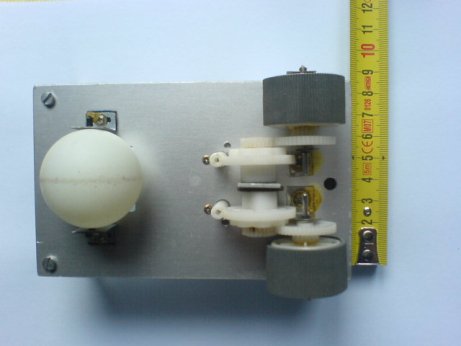
Foto della piastra inferiore del robot AMIR
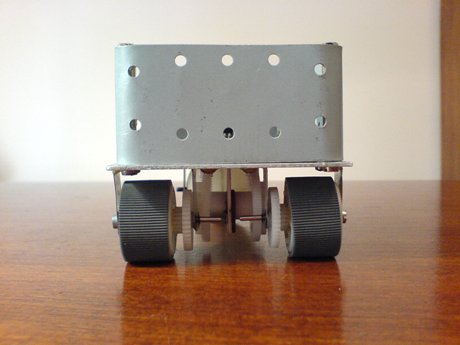
Foto del robot AMIR (dettaglio ruote anteriori)

Foto del robot AMIR (dettaglio pannello posteriore)
Nella piastra inferiore (lato interno) sono stati montati il porta pile (con 8 pile ricaricabili tipo AA da 1,2 VDC) e la scheda di controllo dei motori. La scheda di controllo dei motori è stata realizzata utilizzando due piccoli mini relè 6VDC doppio scambio (recuperati da vecchie segreterie telefoniche), pilotati da due transistor darlington BC517. Sono stati realizzati i vari collegamenti:
- Alimentazione principale
- Tensione 9VDC per l'alimentazione dei motori
- Tensione 5VDC per il controllo dei motori
- 2 Linee di controllo dei motori
Normalmente i due relè sono a riposo, e forniscono la tensione ai motori in modo da far muovere il robot A.M.I.R. in avanti. Quando uno dei due relè viene attivato, tramite un segnale proveniente dalla scheda logica di controllo, invia la tensione con polarità invertita al rispettivo motorino. Pilotando opportunamente i due relè è possibile far muovere il robot A.M.I.R. nelle seguenti direzioni:
Rele1 off - Rele2 off > avanti diritto
Rele1 off - Rele2 on > avanti destra
Rele1 on - Rele2 off > avanti sinistra
Rele1 on - Rele2 on > indietro diritto
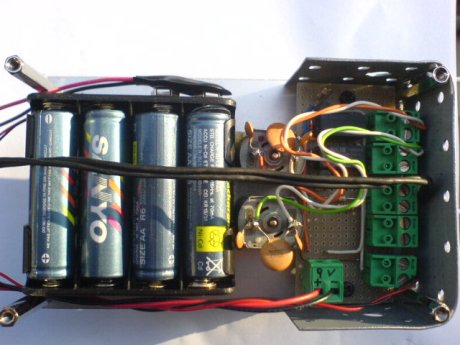
Foto del robot AMIR (dettaglio pile, motori, scheda controllo motori)
Dopo aver completato i collegamenti dei motori e della scheda di controllo dei motori, è stata montata la seconda lastra di alluminio opportunamente forata per permettere il passaggio dei cavetti di collegamento. Nella scheda di controllo (realizzata con una basetta millefori) sono stati cablati:
- Il NUTCHIP (costituisce il "cervello" del robot A.M.I.R.)
- Il regolatore di tensione 7805
- Il deviatore a levetta (permette di passare dalla modalità "Spento/Ricarica" alla modalità "Acceso")
- Il connettore per il carica batteria
- Il connettore femmina 90° RJ45 per circuiti stampati
- Il led rosso da 2,5 mm (indica quando il robot A.M.I.R. è acceso)
- I connettori per circuiti stampati con connessione a vite
La basetta è stata fissata alla lastra di alluminio con dei distanziatori recuperati da un vecchio PC.
I sensori di contatto sono stati realizzati con due deviatori "finecorsa" ai quali sono stati saldati delle lamelline flessibili (recuperati da un vecchio cordless). Un pezzettino di guaina termorestringente nasconde la saldatura e garantisce maggiore solidità ai sensori. I sensori sono stati fissati alla lastra di alluminio con delle viti autofilettanti.
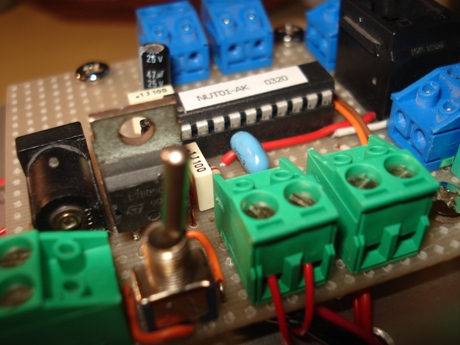
Foto del robot AMIR (dettaglio scheda controllo)
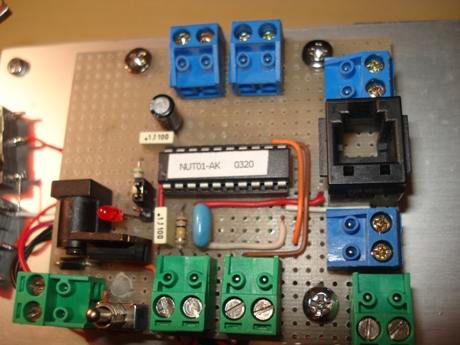
Foto del robot AMIR (dettaglio scheda controllo)
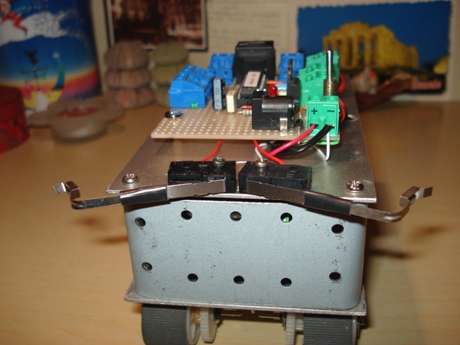
Foto del robot AMIR (dettaglio sensori di contatto)
Il robot è stato costruito quasi interamente con pezzi di ricambio recuperati da apparecchiature elettroniche guaste, fatta eccezione per il NUTCHIP utilizzato per la scheda di controllo. Ho preferito costruire un robot con materiali recuperati, sperimentando la realizzazione della meccanica e della parte elettronica per il piacere di "crearlo" con le mie mani. Infatti il fine non era quello di giocare con un robot commerciale "preconfezionato", ma divertirmi a realizzarlo partendo da semplici e comuni materiali che ogni appassionato di elettronica e/o robotica ha nel proprio "laboratorio".
La struttura del robot A.M.I.R. è formata da due piastre di alluminio, separate da quattro distanziatori esagonali da 4 cm. Nella piastra inferiore trovano posto le due ruote motrici, i due motorini, la pallina che funge da terza ruota, il contenitore per le pile ricaricabili e la logica di controllo dei motori. Nella piastra superiore sono stati collocati i due sensori di contatto e la scheda logica centrale.
Come si può notare dalle foto seguenti, il robot A.M.I.R. ha una struttura "simile" al famoso e conosciutissimo Boe-Bot® robot prodotto e distribuito dalla Parallax Inc.
Elenco dei componenti del robot A.M.I.R.
- 2 lastre di alluminio (15cm x 9cm)
- 4 distanziatori esagonali da 4cm
- 2 motorini 6-9VDC con vite senza fine
- 4 ingranaggi in plastica
- 2 ruote
- 1 pallina da ping-pong
- 2 deviatori "finecorsa"
- 14 connettori per circuiti stampati con connessione a vite
- 1 connettore per il carica batteria
- 1 porta pile 8 posti
- 8 pile ricaricabili tipo AA
- 1 deviatore a levetta
- 1 connettore femmina 90° RJ45 per circuiti stampati
- 1 NUTCHIP
- 2 mini relè 6VDC doppio scambio
- piastra multifori per circuiti stampati
- componenti elettronici vari (condensatori, resistori, transistor, etc)
- minuteria meccanica varia (viti di varie dimensioni, rondelle, squadrette in alluminio, etc)
- cavetti elettrici di varie misure e colori
- 4 distanziatori esagonali da 4cm
- 2 motorini 6-9VDC con vite senza fine
- 4 ingranaggi in plastica
- 2 ruote
- 1 pallina da ping-pong
- 2 deviatori "finecorsa"
- 14 connettori per circuiti stampati con connessione a vite
- 1 connettore per il carica batteria
- 1 porta pile 8 posti
- 8 pile ricaricabili tipo AA
- 1 deviatore a levetta
- 1 connettore femmina 90° RJ45 per circuiti stampati
- 1 NUTCHIP
- 2 mini relè 6VDC doppio scambio
- piastra multifori per circuiti stampati
- componenti elettronici vari (condensatori, resistori, transistor, etc)
- minuteria meccanica varia (viti di varie dimensioni, rondelle, squadrette in alluminio, etc)
- cavetti elettrici di varie misure e colori
Montaggio dei motori e delle ruote del robot A.M.I.R.
Nella piastra inferiore sono stati montati, in posizione perpendicolare, i due motorini da 6VDC con vite senza fine (recuperati da un vecchio fax). Le ruote motrici (recuperate da una vecchia stampante) sono state fissate alla piastra inferiore con due squadrette di alluminio e "accoppiate" ai motori tramite ingranaggi in plastica (recuperati da una vecchia stampante). La pallina da ping pong è stata forata diametralmente e fissata alla piastra con due squadrette in alluminio
Foto della piastra inferiore del robot AMIR
Foto della piastra inferiore del robot AMIR
Foto del robot AMIR (dettaglio ruote anteriori)
Foto del robot AMIR (dettaglio pannello posteriore)
Montaggio del porta pile e della scheda controllo motori
Nella piastra inferiore (lato interno) sono stati montati il porta pile (con 8 pile ricaricabili tipo AA da 1,2 VDC) e la scheda di controllo dei motori. La scheda di controllo dei motori è stata realizzata utilizzando due piccoli mini relè 6VDC doppio scambio (recuperati da vecchie segreterie telefoniche), pilotati da due transistor darlington BC517. Sono stati realizzati i vari collegamenti:
- Alimentazione principale
- Tensione 9VDC per l'alimentazione dei motori
- Tensione 5VDC per il controllo dei motori
- 2 Linee di controllo dei motori
Normalmente i due relè sono a riposo, e forniscono la tensione ai motori in modo da far muovere il robot A.M.I.R. in avanti. Quando uno dei due relè viene attivato, tramite un segnale proveniente dalla scheda logica di controllo, invia la tensione con polarità invertita al rispettivo motorino. Pilotando opportunamente i due relè è possibile far muovere il robot A.M.I.R. nelle seguenti direzioni:
Rele1 off - Rele2 off > avanti diritto
Rele1 off - Rele2 on > avanti destra
Rele1 on - Rele2 off > avanti sinistra
Rele1 on - Rele2 on > indietro diritto
Foto del robot AMIR (dettaglio pile, motori, scheda controllo motori)
Montaggio della scheda di controllo e sensori di contatto
Dopo aver completato i collegamenti dei motori e della scheda di controllo dei motori, è stata montata la seconda lastra di alluminio opportunamente forata per permettere il passaggio dei cavetti di collegamento. Nella scheda di controllo (realizzata con una basetta millefori) sono stati cablati:
- Il NUTCHIP (costituisce il "cervello" del robot A.M.I.R.)
- Il regolatore di tensione 7805
- Il deviatore a levetta (permette di passare dalla modalità "Spento/Ricarica" alla modalità "Acceso")
- Il connettore per il carica batteria
- Il connettore femmina 90° RJ45 per circuiti stampati
- Il led rosso da 2,5 mm (indica quando il robot A.M.I.R. è acceso)
- I connettori per circuiti stampati con connessione a vite
La basetta è stata fissata alla lastra di alluminio con dei distanziatori recuperati da un vecchio PC.
I sensori di contatto sono stati realizzati con due deviatori "finecorsa" ai quali sono stati saldati delle lamelline flessibili (recuperati da un vecchio cordless). Un pezzettino di guaina termorestringente nasconde la saldatura e garantisce maggiore solidità ai sensori. I sensori sono stati fissati alla lastra di alluminio con delle viti autofilettanti.
Foto del robot AMIR (dettaglio scheda controllo)
Foto del robot AMIR (dettaglio scheda controllo)
Foto del robot AMIR (dettaglio sensori di contatto)